Preston Lau: A Journey Through Memories, Tech, and Humanity
Welcome to my personal blog that delves into the intricate tapestry of personal albums and the fascinating intersection of ever-evolving technology and humanity. Come along on a journey with me as we delve into the seamless fusion of creativity, state-of-the-art AI and robotics, intricately interwoven within the tapestry of our shared awareness. Have fun!
MIT Research: Combining Disparate Datasets for Effective Multipurpose Robot Training
AI Summary
Researchers at MIT have developed Policy Composition (PoCo), a technique that combines disparate datasets using generative AI diffusion models to train more versatile and adaptable robots, achieving a 20% improvement in task performance over baseline techniques.
Researchers are constantly seeking ways to create more versatile and adaptable machines. One of the key challenges in this pursuit is the need for vast amounts of diverse data to train robots effectively. However, existing robotic datasets often vary widely in modality, domain, and task specificity, making it difficult to efficiently incorporate data from multiple sources into a single machine-learning model.
Policy Composition: A Novel Approach
To address this issue, researchers at MIT have developed a novel technique called Policy Composition (PoCo), which leverages generative AI, specifically diffusion models, to combine multiple sources of data across domains, modalities, and tasks. This approach enables the creation of more effective multipurpose robots that can perform a variety of tasks in different settings.
The PoCo method involves training separate diffusion models to learn strategies, or policies, for completing specific tasks using individual datasets. These policies are then combined into a general policy that allows a robot to perform multiple tasks in various environments.
Impressive Results in Simulations and Real-World Experiments
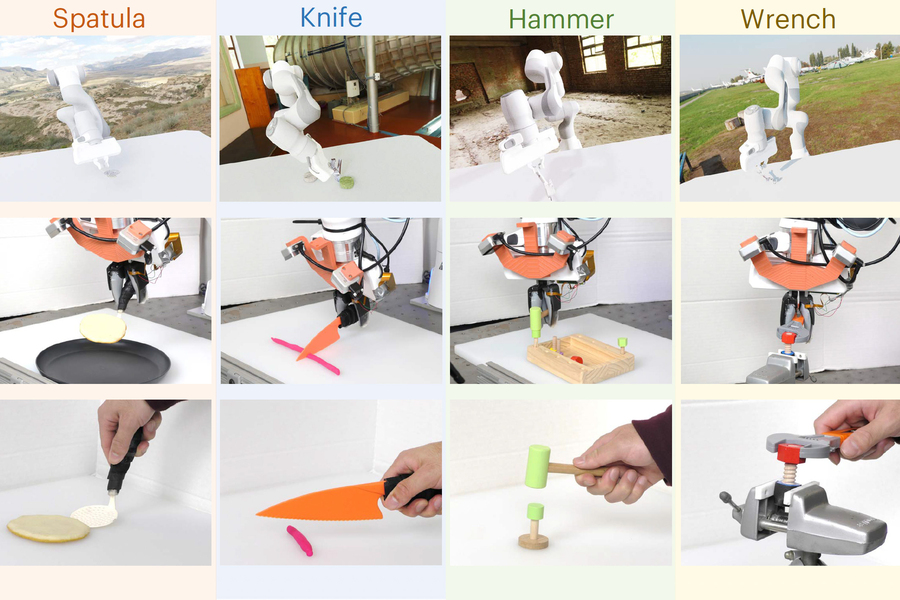
The researchers tested PoCo in both simulations and real-world experiments, where robotic arms performed a range of tool-use tasks, such as hammering a nail or flipping an object with a spatula. The results were impressive, with PoCo leading to a 20 percent improvement in task performance compared to baseline techniques.
One of the key benefits of the PoCo approach is its ability to combine policies to leverage the strengths of different datasets. For example, a policy trained on real-world data might excel in dexterity, while a policy trained on simulation data could offer better generalization.
Another advantage of PoCo is its flexibility and scalability. Because the policies are trained separately, users can mix and match diffusion policies to achieve optimal results for specific tasks. Additionally, new data in different modalities or domains can be easily incorporated by training an additional Diffusion Policy with the new dataset, rather than starting the entire process from scratch.
Future Directions and Potential Impact
Looking ahead, the researchers plan to apply the PoCo technique to long-horizon tasks, where robots would need to switch between multiple tools to complete a task. They also aim to incorporate larger robotics datasets to further improve performance.
The potential impact of this research is significant, as it could pave the way for more adaptable and efficient robots capable of performing a wide range of tasks in various settings. As Jim Fan, a senior research scientist at NVIDIA, notes, "We will need all three kinds of data to succeed for robotics: internet data, simulation data, and real robot data. How to combine them effectively will be the million-dollar question. PoCo is a solid step on the right track."